Orthogonale Regression und Streuellipsen
Zu einem Dreieck gibt es unendlich viele Ellipsen, die
die Dreiecksseiten von innen
berühren. Die flächengrößte dieser Ellipsen ist die Steiner-Innenellipse1. Die dazu duale Umellipse ist die flächenkleinste Ellipse durch die Eckpunkte des Dreiecks:
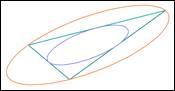
Abb.1: Steiner-Innenellipse und -Umellipse eines Dreiecks
Es zeigt sich, dass die Steiner-Ellipsen zu einer
Ellipsenschar gehören, die zu beliebigen ebenen Punktwolken durch Hauptachsentransformation
berechnet werden kann. Die statistischen Begriffe Varianz und Kovarianz zeigen
dabei eine geometrische Bedeutung.

Abb. 2: Punktwolke: PISA-Ergebnisse oder elliptische Galaxie?
Die Punktwolke ![]() sei (ohne
Einfluss auf Varianz und Kovarianz) bereits so verschoben, dass der Schwerpunkt
im Koordinatenursprung liegt:
sei (ohne
Einfluss auf Varianz und Kovarianz) bereits so verschoben, dass der Schwerpunkt
im Koordinatenursprung liegt: ![]() .
.
Die Punkte der Wolke seien in Polarkoordinaten
gegeben:
![]()
Die Kovarianz sei ![]() , die Varianzen
, die Varianzen ![]() bzw.
bzw. ![]() .
.
Wir betrachten eine
Ursprungsgerade ![]() mit dem
Steigungswinkel
mit dem
Steigungswinkel ![]() .
.
Für jeden Punkt der Wolke gilt dann folgende
Überlegung:

Abb. 3: Projektion auf Ursprungsgerade
Es
ist: ![]()
![]()
und analog: ![]()
![]()
Die
Ursprungsgerade wird im folgenden so bestimmt werden, dass sie eine
Extremaleigenschaft in Bezug auf Varianz und Kovarianz der Punktwolke erfüllt.
Sie
wird sich später als Hauptachse der gesuchten Ellipsenschar erweisen.
Wir
definieren nun die beiden Funktionen:

![]() ist der mittlere
Flächeninhalt "orthogonalen"
Quadrate:
ist der mittlere
Flächeninhalt "orthogonalen"
Quadrate:
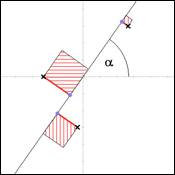
Abb.
4: Quadrate der Lote
Dazu
analog ist ![]() ist die Varianz
der auf der Gerade
ist die Varianz
der auf der Gerade ![]() liegenden Punkte:
liegenden Punkte:
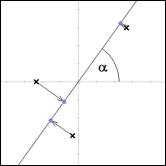
Abb.
5: Varianz der projizierten Punkte
Die
Funktion![]() stellt eine Verallgemeinerung der Varianz dar, denn es gilt:
stellt eine Verallgemeinerung der Varianz dar, denn es gilt:
![]() und
und ![]()
Die Funktionen V und F sind um ![]() gegeneinander
phasenverschoben:
gegeneinander
phasenverschoben: ![]() .
.
Wegen
![]() gilt:
gilt: ![]()
Daraus
ergibt sich ![]() . Einem Maximum der (nichtkonstanten) Funktion
. Einem Maximum der (nichtkonstanten) Funktion ![]() entspricht daher
ein Minimum von
entspricht daher
ein Minimum von ![]() und umgekehrt.
und umgekehrt.
Berechnung
der Extrema:

![]()
![]()
und
daher ![]() (für
(für ![]() )
)
Für
![]() erhält man
erhält man
![]() . Im folgenden gelte:
. Im folgenden gelte: ![]()
Im
Intervall ![]() gibt
es eine Maximumstelle und eine Minimumstelle.
gibt
es eine Maximumstelle und eine Minimumstelle.
Anders
als bei den gebräuchlichen Regressionsgeraden werden hier nicht die senkrecht bzw. waagerecht gemessenen Abstände
in der Quadratsumme zum Minimum gemacht sondern die orthogonal gemessenen. Man
könnte daher von "orthogonaler Regression" sprechen.
Es bezeichne ![]() den Winkel
den Winkel ![]()
und
![]()
Der Test mit der zweiten Ableitung
ergibt: ![]() ,
,
wobei
das negative Vorzeichen für ![]() gilt.
gilt.
Man
erhält für ![]() :
:
![]()
![]()
Anderenfalls
gelten die umgekehrten Zuordnungen.
Beispiel:
![]() . Es gilt:
. Es gilt: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() und,
da
und,
da ![]() ,
, ![]() ,
,
![]()
Die Extremwerte werden später unter
Verwendung des Matrizenkalküls berechnet.
Genau
wie beim Übergang von der Varianz zur Standardabweichung im Eindimensionalen
sollte man auch bei ![]() und
und ![]() die Wurzel
ziehen. Man erhält dadurch Maßstabsinvarianz und die richtigen Einheiten. In
Polarkoordinaten und mit den Daten aus dem Beispiel ergibt sich:
die Wurzel
ziehen. Man erhält dadurch Maßstabsinvarianz und die richtigen Einheiten. In
Polarkoordinaten und mit den Daten aus dem Beispiel ergibt sich:
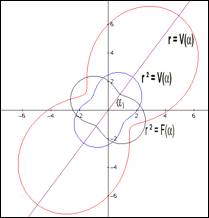
Abb.
6: Graphen
zu ![]() ,
, ![]() und
und ![]()
Betrachten wir die
Ursprungsgerade mit Steigungswinkel ![]() (wegen
(wegen ![]() ), die durch die "Taille" der zu
), die durch die "Taille" der zu ![]() gehörigen Kurve
und gleichzeitig durch die Scheitelpunkte von
gehörigen Kurve
und gleichzeitig durch die Scheitelpunkte von ![]() verläuft. Der
Winkel
verläuft. Der
Winkel![]() ist nunmehr so bestimmt, dass die Summe der in Abb. 4
dargestellten Abstandsquadrate der Punkte von dieser Gerade minimal ist:
ist nunmehr so bestimmt, dass die Summe der in Abb. 4
dargestellten Abstandsquadrate der Punkte von dieser Gerade minimal ist: ![]() . Entsprechend liest man an der zu V gehörigen Kurve ab, dass
die in Richtung der Geraden entsprechend gemessene Varianz
. Entsprechend liest man an der zu V gehörigen Kurve ab, dass
die in Richtung der Geraden entsprechend gemessene Varianz ![]() maximal ist, d.h.
maximal ist, d.h. ![]() .
.
Darstellung mit Quadratischen Formen
Die Kovarianzmatrix ![]() hat die
Determinante
hat die
Determinante ![]() .
.
Wegen der Ungleichung von
Cauchy-Schwarz gilt ohnehin:
![]() .
.
Im Falle der Gleichheit würde
für den Korrelationskoeffizienten folgen: ![]()
Daraus ergäbe sich, dass alle
Punkte auf einer (steigenden oder fallenden) Gerade lägen.
Fordert man, dass die
Punktwolke aus Punkten besteht, die nicht alle auf einer Geraden liegen, ergibt sich als Mindestanzahl 3 sowie,
dass ![]() .
.
Daraus folgt, dass die
Kovarianzmatrix positiv definit ist.
Man
erhält dadurch die positiv definite quadratische Form
![]()
In
Polarkoordinaten:
![]()
![]()
Gleichheit tritt nur für ![]() bzw.
bzw. ![]() ein. Hält man
den Winkel
ein. Hält man
den Winkel![]() fest, so wachsen die Funktionswerte quadratisch mit
fest, so wachsen die Funktionswerte quadratisch mit ![]() . Die quadratische Form kann also als Paraboloid mit
Scheitelpunkt im Koordinatenursprung dargestellt werden.
. Die quadratische Form kann also als Paraboloid mit
Scheitelpunkt im Koordinatenursprung dargestellt werden.
Jeder Schnitt mit einer Ebene, die die z-Achse
enthält, ist eine Parabel:
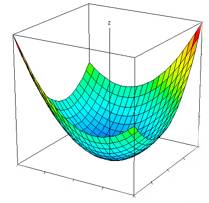
Abb.
7: Darstellung von ![]()
Hauptachsentransformation
Bei den Niveaulinien von ![]() handelt es
sich um Ellipsen:
handelt es
sich um Ellipsen:
Beweis: Um den "gemischten" Term in ![]() zu eliminieren,
führt man mit Hilfe der Drehmatrix
zu eliminieren,
führt man mit Hilfe der Drehmatrix
![]() .
.
und der Substitution ![]() neue Koordinaten
ein:
neue Koordinaten
ein:
![]()
Das Produkt der in der Mitte stehenden drei Matrizen
wird explizit ausgerechnet zu
![]()
![]()
![]()
![]() (*)
(*)
![]()
Für die Winkel![]() und
und![]() nimmt diese Matrix Diagonalgestalt an. Zur Vereinfachung der
Darstellung sei im folgenden
nimmt diese Matrix Diagonalgestalt an. Zur Vereinfachung der
Darstellung sei im folgenden ![]() und
und ![]() vorausgesetzt.
Man erhält die Matrix
vorausgesetzt.
Man erhält die Matrix
![]()
Die Berechnung der Extremwerte in der Hauptdiagonalen
erfolgt nun nicht etwa numerisch über das Einsetzen des berechneten Winkels in
die trigonometrischen Funktionen sondern nach den Rechenregeln für
Determinanten. Es gilt nämlich einerseits, dass das Produkt der gesuchten Extremwerte bekannt ist:
![]()
Andererseits ergibt die Addition der in der
Hauptdiagonale von (*) stehenden Terme
wegen ![]() die ebenfalls bekannte Summe
die ebenfalls bekannte Summe
![]()
Die Werte ![]() ,
, ![]() sind daher die
Lösungen der quadratischen Gleichung
sind daher die
Lösungen der quadratischen Gleichung
![]()
Es handelt sich um die charakteristische Gleichung der
Kovarianzmatrix.
Die gesuchten Extremwerte sind also die Eigenwerte der
Kovarianzmatrix:
![]()
Die Eigenwerte
sind beide positiv und (falls ![]() ) voneinander verschieden.
) voneinander verschieden.
Als Bezeichnung sei ![]() vereinbart.
Die zugehörigen Eigenvektoren sind:
vereinbart.
Die zugehörigen Eigenvektoren sind:
![]()
Die zum Wert ![]() gehörige
Niveaulinie hat im gedrehten Koordinatensystem
gehörige
Niveaulinie hat im gedrehten Koordinatensystem
die Gleichung:
![]()
Es handelt sich also – wie behauptet – um
eine Ellipse. ÿ
Wählt man speziell ![]() , so
ergibt sich
, so
ergibt sich ![]() , also
, also
![]()
![]()
Die Halbachsen haben die
Längen![]() ,
, ![]() . Normierung der Eigenvektoren und Multiplikation mit diesen
Werten ergibt die Scheitelpunkte im ursprünglichen Koordinatensystem.
. Normierung der Eigenvektoren und Multiplikation mit diesen
Werten ergibt die Scheitelpunkte im ursprünglichen Koordinatensystem.
Die Ellipse berührt den Graphen von ![]() von innen:
von innen:
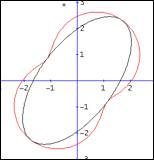
Abb. 8
Die Lage und die Maße ermöglichen es, eine Koordinatengleichung der Ellipse direkt aus
derjenigen von ![]() durch eine
Inversion am Kreis
durch eine
Inversion am Kreis ![]() zu
bestimmen.
zu
bestimmen.
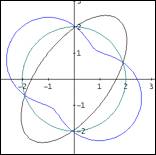
Abb. 9 Inversion am Kreis
Bei einer Inversion am Kreis muss das Produkt der
Radien ![]() sein.
sein.
Aus ![]() folgt mit
folgt mit ![]()
dass ![]()
Ausmultplizieren ergibt eine Koordinatengleichung der
Inversionskurve:
![]()
Also geht ![]() durch Inversion
über in die Ellipse:
durch Inversion
über in die Ellipse:
![]()
Benutzt man wieder Matrizen, lässt sich diese
Ellipsengleichung sehr knapp mit der inversen Kovarianzmatrix schreiben:
Wegen ![]() ist sie
äquivalent zu
ist sie
äquivalent zu ![]()
Definition:
Sei
W eine ebene Wolke aus Punkten, die nicht alle auf einer Geraden liegen.
![]() sei die
Kovarianzmatrix. Die Ellipsen mit der Gleichung
sei die
Kovarianzmatrix. Die Ellipsen mit der Gleichung
![]() oder kurz
oder kurz ![]()
sowie ihre Translationen heißen Streuellipsen von W.
Die
Ellipse mit ![]() heißt
"Standardstreuellipse".
heißt
"Standardstreuellipse".
Aus der Annahme folgt![]() und dass die Mindestpunktanzahl 3 beträgt.
und dass die Mindestpunktanzahl 3 beträgt.
Die Ellipsen sind also
wohldefiniert. Der Grenzfall Kreis tritt genau dann auf, wenn ![]() . Die Streuellipsen sind die geometrischen Orte der Punkte,
die denselben Mahalanobis-Abstand
. Die Streuellipsen sind die geometrischen Orte der Punkte,
die denselben Mahalanobis-Abstand ![]() bzw.
bzw. ![]() vom Zentrum mit Ortsvektor
vom Zentrum mit Ortsvektor ![]() haben. Sie sind
bei bivariater Normalverteilung die Konturlinien gleicher Wahrscheinlichkeitsdichte.
Das Mahalanobis-Abstandsmaß geht den zu messenden Daten nicht voraus sondern
entsteht gewissermaßen erst mit ihnen. Die (euklidische) Abstände werden entsprechend
der Varianz in der jeweiligen Richtung gewichtet.
haben. Sie sind
bei bivariater Normalverteilung die Konturlinien gleicher Wahrscheinlichkeitsdichte.
Das Mahalanobis-Abstandsmaß geht den zu messenden Daten nicht voraus sondern
entsteht gewissermaßen erst mit ihnen. Die (euklidische) Abstände werden entsprechend
der Varianz in der jeweiligen Richtung gewichtet.
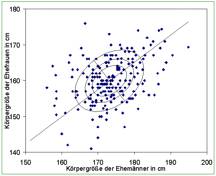
Abb. 10 Beispiel für Streuellipsen
Die eingezeichneten Geraden sind Translationen der
Eigenräume der Kovarianzmatrix und Hauptachsen der Ellipsen. Man könnte sie als
Dritte Regressionsgeraden bezeichnen. In diesem Beispiel wäre eine Verwendung
der üblichen ersten oder zweiten Regressionsgerade wegen der Gleichartigkeit
der dargestellten Daten ganz unangebracht, denn beide Komponenten des
Datensatzes sind in gleicher Weise fehlerbehaftet. Die erste Regressionsgerade würde hier etwa 18° flacher, die
zweite etwa 30° steiler verlaufen als die Hauptachse.
Steiner-Ellipsen als spezielle Streuellipsen
Satz: Die Punktwolke bestehe aus den Punkten![]() mit
mit![]() .
.
Dann
gilt:
Die
Streuellipse ![]() ist die
Steiner-Innenellipse des Dreiecks.
ist die
Steiner-Innenellipse des Dreiecks.
Die
Streuellipse ![]() ist die
Steiner-Umellipse des Dreiecks.
ist die
Steiner-Umellipse des Dreiecks.
Beweis:
a) Berechnung der Streuellipse:
Für die Punktwolke ABC mit ![]() gilt:
gilt:
![]()
![]()
![]() .
.
Daher: ![]() ,
, ![]() und
und ![]()
Die Streuellipsen sind also: ![]()
d.h.: ![]()
b) Berechnung der Steiner-Ellipse:
Jedes ebene Dreieck kann (zusammen mit seinen
Steiner-Ellipsen) durch die umkehrbaren Abbildungen Verschiebung, Drehung, zentrische Streckung und Spiegelung auf ein geeignetes Dreieck ![]() mit
mit ![]() abgebildet
werden. Das Dreieck mit
abgebildet
werden. Das Dreieck mit ![]() ist
gleichseitig. Seine
Steiner-Ellipsen sind daher bekannt: es handelt sich (aus
Symmetriegründen) um den Innenkreis:
ist
gleichseitig. Seine
Steiner-Ellipsen sind daher bekannt: es handelt sich (aus
Symmetriegründen) um den Innenkreis: ![]() und um den
Umkreis:
und um den
Umkreis: ![]() .
.
Wenn man das gleichseitige
Dreieck durch die affine Abbildung mit
![]()
auf das Dreieck ![]() abbildet, geht
sein Innenkreis in die Steiner-Innenellipse über. Denn eine affine Abbildung
erhält Teilverhältnisse, und die Innenellipse berührt wie der Innenkreis die
Dreiecksseiten in den Seitenmitten. Die Spaltenvektoren von M haben (als Bildvektoren
der orthogonalen Kreisradien) konjugierte Richtung. Das legt zusammen mit dem
Zentrum die Ellipse bereits fest.
Sie sei durch die Koordinaten
abbildet, geht
sein Innenkreis in die Steiner-Innenellipse über. Denn eine affine Abbildung
erhält Teilverhältnisse, und die Innenellipse berührt wie der Innenkreis die
Dreiecksseiten in den Seitenmitten. Die Spaltenvektoren von M haben (als Bildvektoren
der orthogonalen Kreisradien) konjugierte Richtung. Das legt zusammen mit dem
Zentrum die Ellipse bereits fest.
Sie sei durch die Koordinaten ![]() beschrieben.
beschrieben.
Die
Umkehrabbildung ist gegeben durch: ![]()
Durch Einsetzen in die
Kreisgleichung erhält man: ![]()
Daraus folgt: ![]()
Die Steiner-Innenellipse hat die Gleichung: ![]()
Der Vergleich zeigt: Für ![]() ist die
Streuellipse also die Steiner-Innenellipse.
ist die
Streuellipse also die Steiner-Innenellipse.
Streckung mit dem Faktor 2
ergibt für ![]() die Umellipse. ÿ
die Umellipse. ÿ
Die Berechnung der Streuellipsen ist offenbar von der
Anzahl der zugrunde liegenden Punkte unabhängig. Der Begriff der
Steiner-Ellipse kann daher durch die im Satz genannte Charakterisierung
allgemeiner gefasst werden.
Korollar: Zu jeder Punktwolke W gibt es
Steiner-Ellipsen.
Der Extremaleigenschaft der Steiner-Ellipsen
entspricht bei den Streuellipsen die Eigenschaft der "effektivsten
Darstellung"2.
Die Exzentrizität der Streuellipsen hängt vom
Korrelationskoeffizienten ![]() und
und
vom Verhältnis der Varianzen ![]() ab:
ab:
![]()
Für ![]() ( also
( also ![]() ) gilt:
) gilt: ![]()
Für ![]() gilt:
gilt: ![]() für
für ![]() und
und
![]() für
für ![]()
Auch unkorrelierte
Punktwolken haben also im Allgemeinen keine Kreise als Streuellipsen. Es gibt unkorrelierte
Punktwolken mit Streuellipsen beliebiger Exzentrizität. Dieser Feststellung enthält eine Warnung vor zu
großem Vertrauen in die Aussagekraft des optischen Eindrucks, den eine
statistische Graphik erwecken kann. Falls möglich, sollte man Vx und
Vy mit derselben
Einheit darstellen.
Anwendung ergeben sich in
Mustererkennung und Echtheitsprüfung von Geldscheinen3. Elliptische
Galaxien bestehen aus Milliarden von Sternen. Mit bivariater Statistik kann
jeder Streuellipsen der jeweilige Anteil an der Gesamtzahl der Sterne
zugeordnet werden.
Abbildungsverzeichnis:
[Abb. 2] PISA-Konsortium
(Hrsg.) PISA 2003. Der zweite
Vergleich der Länder in Deutschland - Was wissen und können Jugendliche?,
Münster, New York, München, Berlin: Waxmann 2005. S. 253.
(Schwarz-weiß-invertiert) Abdruck mit freundlicher Genehmigung des Verlags.
[Abb. 10] Daten
aus: A Handbook of Small Data
Sets.
Ed. by D.J. Hand et al.. London:
Chapman and Hall 1994.
Literaturverzeichnis:
Koecher, Max: Lineare Algebra und Analytische Geometrie/Berlin;Heidelberg;
New York;Tokyo: Springer 1983. [ISBN 3-540-12572-8 ]
Tack, Thomas: Die dritte, vierte und fünfte Regressionsgerade.
MNU, Mathematischer und naturwissenschaftlicher Unterricht
59/1 (15.1.2006), S. 7-13. [ISSN
0025-5866.]
Internetquellen [Stand: jeweils 6. April 2007]:
1 http://mathworld.wolfram.com/SteinerInellipse.html
2 http://www.meteo.uni-bonn.de/mitarbeiter/PFried/multstat.pdf [S.15f]
3 http://www2.informatik.hu-berlin.de/~wagnerc/SV2/mahalanobis/aufgabe24.html
http://www-groups.dcs.st-and.ac.uk/~history/Curves/Curves.html
Empfehlenswerte Links:
Anschriften der Verfasser:
Thomas
Tack, Kapitelshof 22, D-53229 Bonn
Hans Walser,
Gerlikonerstrasse 29, CH-8500 Frauenfeld
last
modified: 12. May 2007