Hans Walser, [20190513]
Dualität
1 Worum geht es?
Gelenkmodell zur Illustration der Dualität bei regulären Netzen und sphärischen platonischen Figuren.
2 Grundprinzip
Wir arbeiten mit „Scheren“, also Stäben, welche in der Mitte gelenkig verbunden sind. An den Enden verbinden wir sie ebenfalls gelenkig mit weiteren Scheren.
3 Ebenes Beispiel: Dreiecke und Sechsecke
Die Abbildung 1 zeigt die Ausgangslange. Die Punkte sind Gelenke.
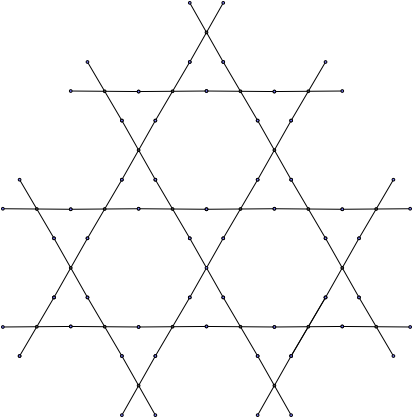
Abb. 1.1: Ausgangslage
Wir können nicht entscheiden, ob wir es mit Dreiecken oder Sechsecken zu tun haben.
Wenn wir jedoch die Gelenkpunkte auf den Kantenmitten der Sechsecke ins Innere der Sechsecke bewegen, werden Dreiecke optisch dominant (Abb. 1.2).
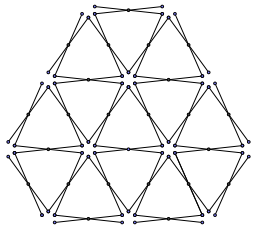
Abb. 1.2: Dreiecke
Die Abbildung 1.3 zeigt die Situation beim „Überziehen“.
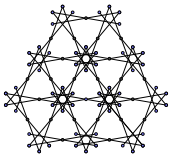
Abb. 1.3: Überzogene Dreiecke
Wenn wir umgekehrt, ausgehend von der Situation der Abbildung 1.1, die Gelenkpunkte auf den Kantenmitten der Dreiecke ins Innere der Dreiecke bewegen, werden Sechsecke optisch dominant (Abb. 1.4).
Diese Figur ist dual zur Figur der Abbildung 1.2 mit den Dreiecken.
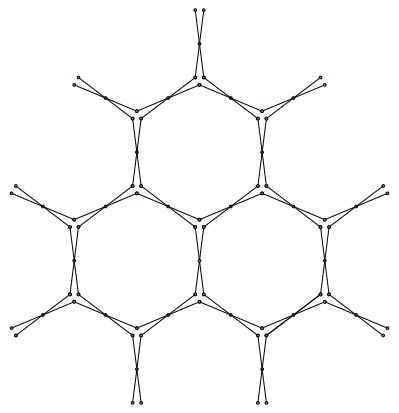
Abb. 1.4: Sechsecke
Wir können auch hier überziehen (Abb. 1.5).
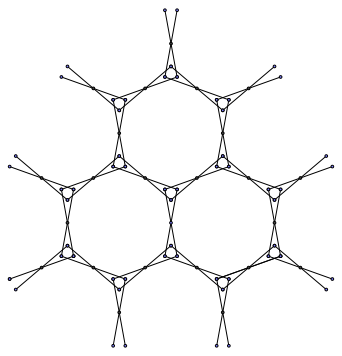
Abb. 1.5: Überzogene Sechsecke
Bei realen Modellen können die Gelenkpunkte nicht über die Stangen gezogen werden. Ein Überziehen ist daher nicht möglich.
4 Sphärische Beispiele
Die Scheren sind aus Metallbändern gefertigt (Material aus der Verpackungsindustrie). Das Band ist ein halbes Inch breit (12.7mm). Der Lochabstand zwischen zwei Gelenken, also dem Mittelgelenk und einem Außengelenk, beträgt drei Inch (76.2mm). Der Lochdurchmesser beträgt 3mm. Das Gelenk ist mit einer M3 Metallschraube und zwei gegeneinander fixierten Muttern realisiert. Die gesamte Länge eines Metallbandes beträgt 165.1 mm. Die Metallbänder werden etwas gekrümmt.
4.1 Oktaeder und Hexaeder
Wir benötigen zwölf Scheren, also 2 Bänder, da Oktaeder und Hexaeder zwölf Kanten haben.
Die Abbildung 2.1 zeigt die Ausgangslage. Es handelt sich um ein sphärisches Kuboktaeder, das aus acht gleichseiteigen sphärischen Dreiecken und sechs regelmäßigen sphärischen Vierecken besteht.

Abb. 2.1: Ausgangslage
Wenn wir nun die Gelenke auf den Kantenmitten der Vierecke ins Innere der Vierecke bewegen, ergibt sich ein sphärisches Oktaeder (Abb. 2.2).

Abb. 2.2: Sphärisches Oktaeder
Wenn wir umgekehrt die Gelenkpunkte auf den Kantenmitten der Dreiecke ins innere der Dreiecke bewegen, ergibt sich ein sphärisches Hexaeder (Abb. 2.3)

Abb. 2.3: Sphärisches Hexaeder
Oktaeder und Hexaeder sind zueinander dual.
Die Trägerkugeln der Abbildung 2.1 bis 2.3 haben verschiedene Durchmesser. Daher verändert sich auch die Krümmung der Metallbänder. Diese müssen daher etwas flexibel sein.
4.2 Sphärisches Tetraeder
Das sphärische Tetraeder ist zu sich selbst dual.
Wir benötigen sechs Scheren, also zwölf Bänder, da das Tetraeder sechs Kanten hat.
Die Abbildung 3.1 zeigt die Ausgangslage. Diese Ausgangslage ist ein Oktaeder.

Abb. 3.1: Ausgangslage
Wir denken uns die acht Dreiecke des Oktaeders abwechslungsweise schwarz und weiß gefärbt. Nun bewegen wir die Gelenke auf den Kantenmitten der schwarzen Dreiecke ins Innere der schwarzen Dreiecke. Die Abbildung 3.2 zeigt, wie das im Einzelnen aussieht.

Abb. 3.2: Zusammenschieben von drei Gelenken
So entsteht ein sphärisches Tetraeder (Abb. 3.3).

Abb. 3.3: Sphärisches Tetraeder
Wenn wir analog mit den weißen Dreiecken vorgehen, erhalten wir das duale Tetraeder.