Hans Walser, [20190421]
Goldberg
Idee: Patrik
G. K. Wiesner, BSc ETHZ, Davidgasse 42, A - 1100 Wien
1 Worum geht es?
Beispiel
einer Zerlegungsgleichheit eines gleichseitigen Dreieckes und eines regelmäßigen
Fünfeckes (Abb. 1) nach Michael Goldberg (1952). Die Zerlegung benötigt sechs
Teile. Kinematische Realisierung.
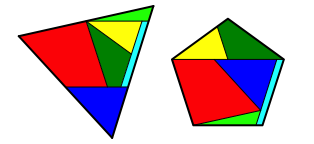
Abb. 1: Dreieck und regelmäßiges Fünfeck
2 Daten
Wir
normieren die Flächen der beiden Polygone auf 1.
Für die
Seitenlänge ![]() des Dreieckes erhalten wir damit:
des Dreieckes erhalten wir damit:
![]() (1)
(1)
Für die
Seitenlänge ![]() des Fünfeckes erhalten wir:
des Fünfeckes erhalten wir:
![]() (2)
(2)
Das
Seitenverhältnis ist:
![]() (3)
(3)
Die
Seitenlänge des Dreieckes ist also fast doppelt so groß wie jene des Fünfeckes.
Allerdings darf man nicht mit dem Näherungswert 2 arbeiten, weil sonst die Zerlegung
sichtbar ungenau wird (eigene Erfahrung).
3 Konstruktives Vorgehen
Wir
beginnen mit dem regelmäßigen Fünfeck und zeichnen die horizontale Diagonale
(Abb. 2a).
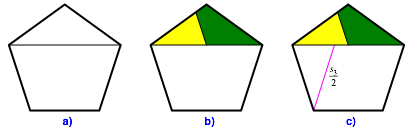
Abb. 2: Erste drei Schritte
Durch den
Mittelpunkt dieser Diagonalen zeichnen wir eine Parallele zur linken Topfseite
des Fünfeckes (Abb. 2b). Somit erhalten wir das gelbe und das dunkelgrüne
Teilstück.
Bis jetzt
haben wir uns ausschließlich in der Fünfeckgeometrie bewegt.
Nun kommt
das Dreieck ins Spiel.
Wir tragen
von der linken unteren Ecke des Fünfeckes aus die halbe Dreieckseite auf die
Diagonale ab (Abb. 2c). Wegen (3) ist die entstehende Strecke (magenta) nicht parallel zur rechten
Topfseite des Fünfeckes.
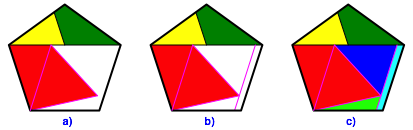
Abb. 3: Fortsetzung der Konstruktion
Die
magenta Strecke ergänzen wir zum gleichseitigen Dreieck (Abb. 3a). So erhalten
wir das rote Viereck.
Durch die
Spitze des gleichseitigen Dreiecks zeichnen wir eine Parallele zur magenta
Strecke (Abb. 3b). Wir haben an dieser Spitze jetzt drei Winkel von 60°. Diese
werden in die Ecken des gleichseitigen Dreiecks kommen.
Wir können
nun noch das dunkelblaue und das hellgrüne Dreieck sowie das hellblaue
Viereck markieren. Das hellblaue Viereck ist dem Anschein zum Trotz kein
Parallelogramm. Lediglich bei beiden kurzen Seiten sind parallel.
Die sechs
Teile können nun gemäß Abbildung 1 ins gleichseitige Dreieck eingepasst werden.
4 Orientierungen
In der Abbildung
4 ist im Fünfeck zusätzlich zu den Farben eine senkrechte Schraffur angebracht
worden.
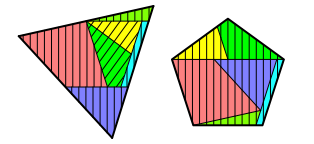
Abb. 4: Orientierungen
Die Teile
werden nun unter Beibehaltung der Schraffur ins Dreieck eingepasst. Bei den
Teilen, die sich im Fünfeck unterhalb der Diagonale befinden, ist die Schraffur
nach wie vor senkrecht. Diese Teile werden also entweder verschoben (dunkelblau
und hellgrün) oder um 180° gedreht (rot und himmelblau). Bei den beiden Teilen
oberhalb der Fünfeckdiagonale (gelb und grün) kommt noch eine Verdrehung um ein
Vielfaches von 36° dazu.
5 Kinematisches Modell
Der
Übergang vom Fünfeck zum Dreieck und zurück lässt sich durch ein kinematisches
Modell visualisieren. Dieses Modell geht auf Patrik G. K. Wiesner,
BSc ETHZ, Davidgasse 42, A - 1100 Wien, zurück und ist patentiert.
Die
Abbildung 5 zeigt die Startposition des Fünfeckes. Die beiden blauen, der gelbe
und der grüne Punkt sind ortsfeste Drehpunkte. Die beiden roten Punkte sind
Gelenkpunkte. Sie bilden zusammen mit den beiden blauen Punkten ein
Parallelogramm. An den Parallelogrammseiten sind der Reihe nach das
hellblaue, das dunkelblaue, das rote und das hellgrüne Teilstück befestigt. Sie
drehen mit diesen Seiten. Im Detail heißt das, dass das hellgrüne Dreieck ortsfest
bleibt, das hellblaue und das hellrote Viereck je um einen blauen Punkt
drehen und das dunkelblaue Dreieck unter Beibehaltung der Orientierung (also
ohne Verdrehen) herumschaukelt.
Das gelbe
Dreieck dreht um den gelben Punkt, und zwar gegengleich zum Parallelogramm und
nur mit einem Fünftel der Drehgeschwindigkeit.
Das
dunkelgrüne Viereck dreht um den dunkelgrünen Punkt im gleichen Sinn wie das
Parallelogramm, aber nur mit vier Fünfteln der Drehgeschwindigkeit.
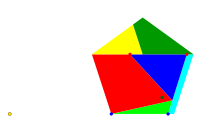
Abb. 5: Startposition
Die
Abbildung 6 zeigt den kinematischen Prozess in Schritten von 30°.
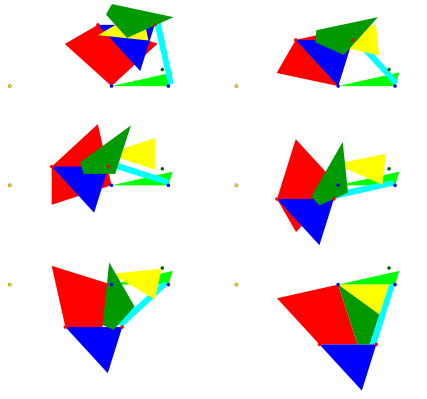
Abb. 6: Kinematik
Auf meiner
Homepage findet sich eine GeoGebra-Animation (Animation3) dazu. Der Prozess
geht hin und zurück. Man kann ihn auch endlos vorwärts laufen lassen, wegen der
unterschiedlichen Drehgeschwindigkeiten dauert es dann ein bisschen, bis die
Startposition wieder erreicht ist (Animation4).
Weitere Animationen
hier.
Wie lässt
sich dies mechanisch realisieren?
Weblinks
DITOH,
Spezieller platonischer Körper
Animationen
https://www.ditoh.com/dr-hans-walser-ethz-uni-basel
Hans
Walser: Dudeney
http://www.walser-h-m.ch/hans/Miniaturen/D/Dudeney/Dudeney.htm
Hans
Walser: Dudeney
http://www.walser-h-m.ch/hans/Miniaturen/D/Dudeney2/Dudeney2.htm
Hans
Walser: Quadrat und Fünfeck
www.walser-h-m.ch/hans/Miniaturen/Q/Quadrat_u_Fuenfeck/Quadrat_u_Fuenfeck.htm