Hans Walser, [20190809]
Kettenantrieb
1 Velokette
Eine Velokette ist genau besehen ein gleichseitiges Polygon. Die Seitenlänge ist die technische Länge eines Kettengliedes, in der Regel 1/2“ (12.7mm) (Abb. 1). Entsprechend sind die zugehörigen Zahnräder regelmäßige Vielecke gleicher Seitenlänge.

Abb. 1: Gleichseitiges Polygon. Seitenlänge ½“
Die Seitenlänge ½“ war auch der Lochabstand der historischen Metallbaukasten im letzten Jahrhundert.
2 Zwei gleiche Zahnräder
Wir normieren die technische Länge eines Kettengliedes und damit die Seitenlänge der regelmäßigen Vielecke auf 1.
2.1 Dreieckige Zahnräder
Die Abbildung 2 zeigt zwei gleichgerichtete dreieckige Zahnräder.
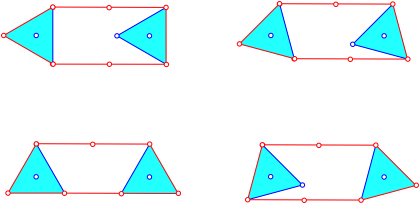
Abb. 2: Dreieckige Zahnräder
Beim Drehen der Zahnräder entstehen Parallelogramme. Der Abstand zwischen dem oberen und dem unteren Kettenteil verändert sich.
Die Abbildung 3 zeigt eine andere Anordnung.

Abb. 3: Andere Anordnung
Wenn wir die beiden Dreiecke drehen, verändern sich die orange eingezeichneten Strecken gemäß Tabelle 1. Die orangen Strecken werden kürzer. Die Kette würde bei konstantem Achsabstand der beiden dreieckigen Zahnräder durchhängen.
|
Drehwinkel |
Länge orange Strecke |
|
0° |
2 |
|
15° |
1.98596 |
|
30° |
1.94420 |
Tab. 1: Orange Strecken
2.2 Viereckige Zahnräder
Die Abbildung 4 zeigt die Situation mit quadratischen Zahnrädern. Wir haben durchgehend Parallelogramme. Der Abstand zwischen dem oberen und dem unteren Kettenteil variiert.
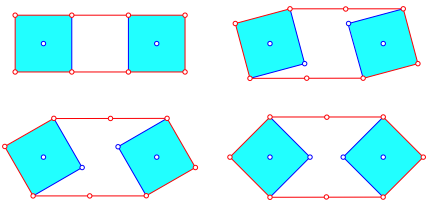
Abb. 4: Quadratische Zahnräder
Die beigefügte Animation illustriert den Fall mit hexagonalen Zahnrädern.
Allgemein haben wir bei einer ungeraden Eckenzahl der regelmäßigen Vielecke das Problem wie bei den Dreiecken. Bei einer geraden Eckenzahl tritt dieses Problem nicht auf.
3 Ungleiche Zahnräder
Für eine Übersetzung benötigen wir zwei Zahnräder ungleicher Größe. Wir arbeiten exemplarisch mit dem einfachsten Fall eines quadratischen und eines dreieckigen Zahnrades. Die Abbildung 5 zeigt zwei Positionen eines Getriebes mit der Kettenlänge 8. Eine Drehung um 45° beim Quadrat führt zu einer Drehung um 60° beim Dreieck. Drei vollen Drehungen des Quadrates entsprechen vier volle Drehungen des Dreiecks.
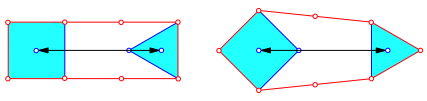
Abb.5: Übersetzung
Nun ist es aber so, dass bei diesen beiden Positionen der Achsabstand zwischen den Zahnrädern ungleich ist.
Für die Position links berechnen wir den Achsabstand:
![]() (1)
(1)
Für die Position rechts berechnen wir den Achsabstand:
 (2)
(2)
Bei festem Achsabstand ist also ein solches Übersetzungsgetriebe mit straff gespannter Kette nicht möglich.

Abb. 6: Kettenantrieb
Dass es in der Praxis trotzdem funktioniert (Abb. 6), mag folgende Gründe haben: Die Zahnräder haben viel mehr Zähne und sind daher näher beim Kreis. Die Achsabstände sind sehr klein und können durch den technischen Spielraum und die Elastizität des Materials aufgefangen werden. Die Ketten sind nicht straff gespannt, schon wegen der Schwerkraft hängen sie etwas durch.
Website
Hans Walser: Aufwickeln (Vortrag)
http://www.walser-h-m.ch/hans/Vortraege/20190913-15/index.html