Hans Walser, [20070130a]
Fortlaufende Spiegelung an den Seiten eines Sehnenvieleckes mit gerader Eckenzahl
1 Worum es geht
In einem Vieleck mit Umkreis (Sehnenvieleck) wird fortlaufend an den Seiten gespiegelt. Bei gerader Eckenzahl entsteht eine Translation, bei ungerader Eckenzahl eine Schubspiegelung.
Stichworte:
Evolvente, Geradenspiegelungen, Parität, Peripheriewinkel, Regelmäßige Vielecke, Rotationen, Sehnenviereck, Symmetrie, Translationen, Zusammensetzung von Abbildungen.
2 Theorem
Es seien ![]() die Seiten eines
Sehnenvieleckes mit gerader Eckenzahl. Dann ist
die Seiten eines
Sehnenvieleckes mit gerader Eckenzahl. Dann ist
![]()
eine Translation.
3 Beispiele
Für ![]() ist
ist ![]() und
und ![]() .
.
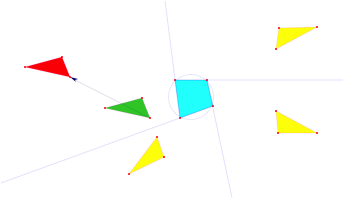
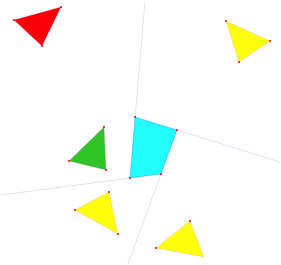
Für ![]() ergibt sich ein
Sehnenviereck. Die Sehnen sind verlängert gezeichnet, um die Spiegelungen
besser sichtbar zu machen.
ergibt sich ein
Sehnenviereck. Die Sehnen sind verlängert gezeichnet, um die Spiegelungen
besser sichtbar zu machen.
Sehnenviereck
Das allgemeine Viereck liefert ein Gegenbeispiel.
Gegenbeispiel
Für ![]() ergibt sich ein
Sehnensechseck.
ergibt sich ein
Sehnensechseck.
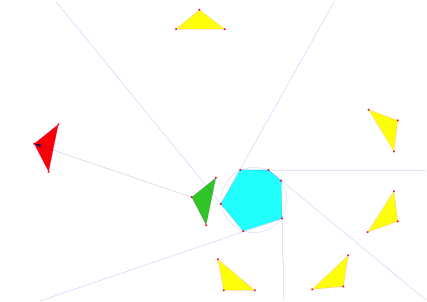
Sehnensechseck
Noch für ![]() das
Sehnenachteck.
das
Sehnenachteck.
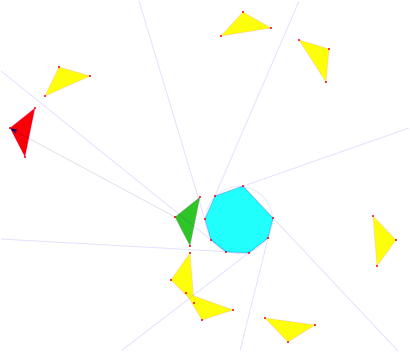
Sehnenachteck
4 Beweisansatz
Für das
Sehnenviereck ist die Sache einfach. Es sei ![]() der Außenwinkel
und
der Außenwinkel
und ![]() der Eckpunkt
zwischen
der Eckpunkt
zwischen ![]() und der
Folgeseite
und der
Folgeseite ![]() . Dann zerfällt
. Dann zerfällt ![]() in zwei
Rotationen, nämlich
in zwei
Rotationen, nämlich ![]() und
und ![]() . Nun hat aber das Sehnenviereck die Winkeleigenschaft:
. Nun hat aber das Sehnenviereck die Winkeleigenschaft: ![]() (und auch
(und auch ![]() ). Somit ist die Abbildung
). Somit ist die Abbildung ![]() insgesamt eine
Rotation (mit einem unbekannten Drehzentrum) und dem totalen Drehwinkel
insgesamt eine
Rotation (mit einem unbekannten Drehzentrum) und dem totalen Drehwinkel ![]() , also eine Translation.
, also eine Translation.
5 Winkeleigenschaft des Sehnenvieleckes mit gerader Eckenzahl
Die Frage
ist nun, ob sich die Winkeleigenschaft des Sehnenviereckes geeignet verallgemeinern
lässt, um die Feststellung über die Abbildung ![]() zu beweisen.
zu beweisen.
Dazu exemplarisch und experimentell ein Sehnensechseck.
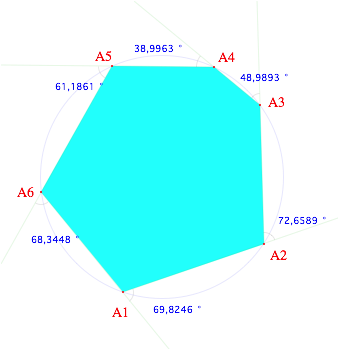
Sehnensechseck mit Außenwinkeln
Im Beispiel ist
![]()
Da die
Auenwinkelsumme 360° ist, haben wir auch ![]() .
.
Wir vermuten:
Im Sehnenvieleck mit 2n Ecken gilt die Winkelbeziehung:
![]()
5.1 Induktionsbeweis
Für ![]() (Sehnenviereck)
gilt die Beziehung.
(Sehnenviereck)
gilt die Beziehung.
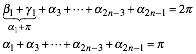
Induktionsannahme:
Die Beziehung gelte für Eckenzahlen kleiner als 2n. Wir zerlegen nun das Sehnenvieleck ![]() mit der Diagonalen
mit der Diagonalen
![]() in das
Sehnenvieleck
in das
Sehnenvieleck ![]() und das
Sehnenviereck
und das
Sehnenviereck ![]() gemäß Figur.
gemäß Figur.
Beweisfigur
Dann ist nach Induktionsvoraussetzung
![]()
und
![]() .
.
Addition liefert
![]() .
.
Nun ist
aber ![]() . Damit erhalten wir
. Damit erhalten wir
 .
.
Wegen der
Außenwinkelsumme ![]() ist dann aber
auch:
ist dann aber
auch:
![]()
Damit ist die Vermutung über die Winkeleigenschaft im Sehnenviereck mit gerader Eckenzahl bewiesen.
5.2 Dynamischer Beweis
Die Winkelbeziehung lässt sich auch durch eine dynamische Überlegung nachweisen.
Bewegen eines Punktes
Wenn wir
einen Punkte mit zum Beispiel ungeradem Index auf dem Kreis bewegen, ändert der
zugehörige Außenwinkel nicht (Peripheriewinkel). Die übrigen Winkel mit
ungeradem Index bleiben unangetastet. Damit bleibt bei diesem Prozess die Summe
![]() für die ungeraden
Indizes unverändert und damit auch die Summe
für die ungeraden
Indizes unverändert und damit auch die Summe ![]() für die geraden
Indizes, obwohl die beiden zum bewegten Punkt benachbarten Winkel verändert
werden, aber eben gegengleich.
für die geraden
Indizes, obwohl die beiden zum bewegten Punkt benachbarten Winkel verändert
werden, aber eben gegengleich.
Nun bewegen wir die Punkte des 2n-Eckes, bis wir ein regelmäßiges 2n-Eck haben. Dort ist die Winkeleigenschaft aus Symmetriegründen erfüllt. Damit gilt sie auch für das unregelmäßige 2n-Eck. Ich finde diesen Beweis schöner als den Induktionsbeweis.
6 Beweis der Abbildungseigenschaft
Wir
zerlegen ![]() in n Paare
in n Paare ![]() . Das macht insgesamt eine Rotation um
. Das macht insgesamt eine Rotation um ![]() , also eine Translation.
, also eine Translation.
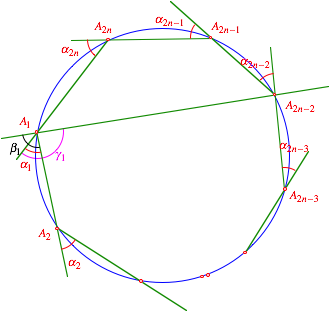
7 Ungerade Eckenzahl
Für ein
Sehnenvieleck mit ungerader Eckenzahl ![]() ist
ist ![]() eine
Schubspiegelung und erst
eine
Schubspiegelung und erst ![]() eine Translation.
Wir brauchen zwei Umgänge.
eine Translation.
Wir brauchen zwei Umgänge.
Sehnenfünfeck
8 Regelmäßige Vielecke mit gerader Eckenzahl
Beim
allgemeinen Sehnenviereck mit gerader Eckenzahl ist der Translationsvektor von
der Verteilung der Eckpunkte auf dem Umkreis abhängig. Bei regelmäßigen
Vielecken hängt der Translationsvektor nur von der Eckenzahl 2n ab. Bei regelmäßigen 2n-Ecken haben wir einen konstanten
Außenwinkel ![]() .
.
Im folgenden sei der Umkreis jeweils der Einheitskreis. Dann gilt:
Im regelmäßigen 2n-Eck ![]() ist
ist
![]()
mit
![]()
Beweis: Wir fassen die Spiegelungen paarweise zusammen:
![]()
Damit ist:
![]()
Der
Drehwinkel ![]() ist der
Außenwinkel des regelmäßigen n-Eckes
ist der
Außenwinkel des regelmäßigen n-Eckes ![]() , das entsteht, wenn wir aus dem ursprünglichen 2n-Eck jede zweite Ecke auswählen.
, das entsteht, wenn wir aus dem ursprünglichen 2n-Eck jede zweite Ecke auswählen.
Nun
bilden wir exemplarisch einen Punkt ab; da wir schon wissen, dass die Gesamtabbildung
eine Translation ist, genügt das, um den Translationsvektor zu bestimmen. Wir
wählen den Urbildpunkt ![]() .
.
Wenn wir
„durchspiegeln“, erhalten wir ![]() mit
mit ![]() .
.
Wenn wir
„durchdrehen“, erhalten wir ![]() mit
mit ![]() .
.
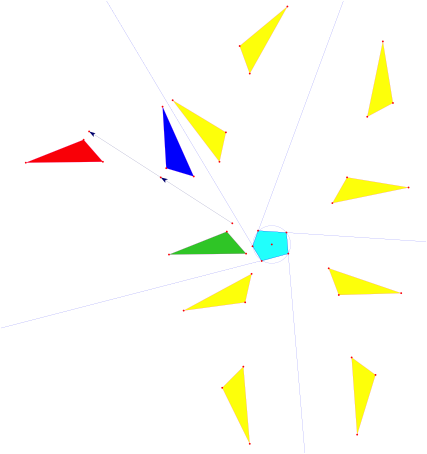
Die
folgende Figur zeigt dieses „Durchdrehen“ für den Fall ![]() , also dem regelmäßigen Zehneck mit dem regelmäßigen Fünfeck
als Hilfsfigur.
, also dem regelmäßigen Zehneck mit dem regelmäßigen Fünfeck
als Hilfsfigur.
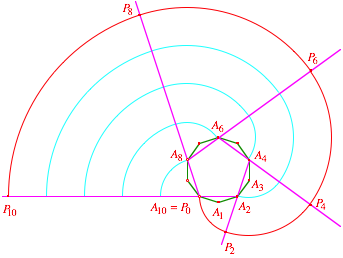
Überlegungsfigur
Bei der
ersten Drehung (um ![]() ) erhalten wir
) erhalten wir ![]() . Bei der Drehung um
. Bei der Drehung um ![]() erhalten wir
erhalten wir ![]() und so weiter und
so fort, und schließlich bei der letzten Drehung (um
und so weiter und
so fort, und schließlich bei der letzten Drehung (um ![]() ) den gesuchten Endpunkt
) den gesuchten Endpunkt ![]() . Die Drehradien nehmen bei jeder Drehung um die Seitenlänge
. Die Drehradien nehmen bei jeder Drehung um die Seitenlänge ![]() des regelmäßigen n-Eckes
des regelmäßigen n-Eckes ![]() zu. Somit erhalten
wir :
zu. Somit erhalten
wir :
![]()
Die Länge
des Translationsvektors ist gleich dem Umfang des regelmäßigen n-Eckes ![]() . Der Translationsvektor kann also nicht beliebig lang
werden, vielmehr gilt:
. Der Translationsvektor kann also nicht beliebig lang
werden, vielmehr gilt:
![]()
Bei den
in der Überlegungsfigur eingezeichneten Bahnkurven handelt es sich um so
genannte Wälzkurven oder Evolventen des regelmäßigen n-Eckes ![]() .
.
Die folgende Figur zeigt die Evolvente des Kreises.
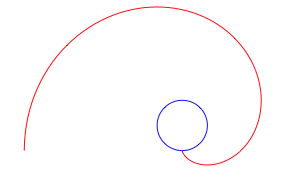
Evolvente