Hans Walser, [20071212a]
Verfolgungskurven
Anregung:
[Simoson 2007]
1 Worum es geht
Ein
Zielobjekt bewegt sich auf einer Kurve ![]() . Dieses Zielobjekt wird von einem Verfolger verfolgt. Dieser
Verfolger bewegt sich auf der Kurve
. Dieses Zielobjekt wird von einem Verfolger verfolgt. Dieser
Verfolger bewegt sich auf der Kurve ![]() . Der Verfolger orientiert sich in jedem Zeitpunkt t auf das Zielobjekt und bewegt sich in
der jeweiligen Richtung auf des Zielobjekt.
. Der Verfolger orientiert sich in jedem Zeitpunkt t auf das Zielobjekt und bewegt sich in
der jeweiligen Richtung auf des Zielobjekt.
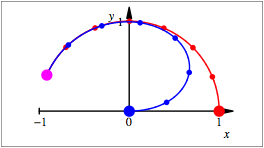
Die Geschwindigkeit des Verfolger steht in einem festen Verhältnis q zur Geschwindigkeit des Zielobjektes.
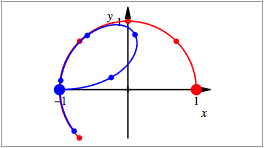
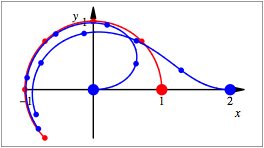
Im
folgenden Beispiel bewegt sich das rot Zielobjekt auf dem Einheitskreis mit dem
Startpunkt ![]() . Der blaue Verfolger startet im Ursprung; seine Geschwindigkeit
ist 10% größer als jene des Zielobjektes, also
. Der blaue Verfolger startet im Ursprung; seine Geschwindigkeit
ist 10% größer als jene des Zielobjektes, also ![]() . Im violetten
Punkt hat der Verfolger das Zielobjekt eingeholt.
. Im violetten
Punkt hat der Verfolger das Zielobjekt eingeholt.
Blauer Verfolger
2 Modellierung
Der
Vektor ![]() ist der
Abstandsvektor vom Verfolger zum Ziel;
ist der
Abstandsvektor vom Verfolger zum Ziel; ![]() sei der
zugehörige Einheitsvektor:
sei der
zugehörige Einheitsvektor:
![]()
Damit
ergibt sich für die Bewegung ![]() des Verfolgers
die Differenzialgleichung:
des Verfolgers
die Differenzialgleichung:
![]()
3 Programm
Im
folgenden MuPAD-Programm ist ![]() und
und ![]() . Ferner ist q das
Geschwindigkeitsverhältnis, a und b sind die Grenzen des
Parameterintervalls für die Zielkurve. Wenn der Verfolger das Ziel trifft, wird
die Zielkurve nicht weiter ausgefahren, die obere Intervallgrenze b also nicht erreicht. Zur besseren
chronologischen Orientierung sind auf den beiden Kurven entsprechende
Teilpunkte eingezeichnet. Falls das gesamte Parameterintervall durchfahren
wird, sind es N Teilpunkte, sonst
weniger. Mit
. Ferner ist q das
Geschwindigkeitsverhältnis, a und b sind die Grenzen des
Parameterintervalls für die Zielkurve. Wenn der Verfolger das Ziel trifft, wird
die Zielkurve nicht weiter ausgefahren, die obere Intervallgrenze b also nicht erreicht. Zur besseren
chronologischen Orientierung sind auf den beiden Kurven entsprechende
Teilpunkte eingezeichnet. Falls das gesamte Parameterintervall durchfahren
wird, sind es N Teilpunkte, sonst
weniger. Mit ![]() wird die für die
diskretisierte Berechnung verwendete Schrittlänge bezeichnet. Ein allfälliger
Treffpunkt wird violett gezeichnet.
wird die für die
diskretisierte Berechnung verwendete Schrittlänge bezeichnet. Ein allfälliger
Treffpunkt wird violett gezeichnet.
Das Programm liefert das Beispiel der obigen Figur. Der Programmkern, welcher der Differenzialgleichung entspricht, ist blau eingefärbt.
x:=t->cos(t):
y:=t->sin(t):
u[0]:=0:
v[0]:=0:
q:=1.1:
a:=0:
b:=1.25*PI:
N:=10:
dt:=0.001:
z[0]:=float(x(a))+I*float(y(a)):
w[0]:=float(u[0])+I*float(v[0]):
K:=ceil((b-a)/dt):
m:=K/N:
for k from 1 to K do
z[k]:=float(x(a+k*dt))+I*float(y(a+k*dt)):
dz[k]:=z[k]-z[k-1]:
r[k]:=z[k-1]-w[k-1]:
re[k]:=r[k]/abs(r[k]):
w[k]:=w[k-1]+q*re[k]*abs(dz[k]):
end_for:
k:=1:
repeat
k:=k+1 until Re(re[k]/re[k-1])<0 or
k=K
end_repeat:
k1:=k:
Kurvez:=plot::Polygon2d([[Re(z[k]),Im(z[k])]$k=0..k1],
LineWidth=1/2, LineColor=[1,0,0]):
Punktz:=j->plot::Point2d([Re(z[j*floor(m)]),Im(z[j*floor(m)])],
PointSize=2, PointColor=[1,0,0]):
Startz:=plot::Point2d([Re(z[0]),Im(z[0])],
PointSize=4,
PointColor=[1,0,0]):
Kurvew:=plot::Polygon2d([[Re(w[k]),Im(w[k])]$k=0..k1],
LineWidth=1/2, LineColor=[0,0,1]):
Punktw:=j->plot::Point2d([Re(w[j*floor(m)]),Im(w[j*floor(m)])],
PointSize=2, PointColor=[0,0,1]):
Startw:=plot::Point2d([Re(w[0]),Im(w[0])],
PointSize=4,
PointColor=[0,0,1]):
Punktt:=plot::Point2d([Re(w[k1]),
Im(w[k1])], PointSize=4,
PointColor=[1,0,1]):
if k1<K then
plot(Startz, Punktz(j)$j=0..floor(k1/m),
Kurvez,
Startw, Punktw(j)$j=0..floor(k1/m),
Kurvew, Punktt,
Scaling=Constrained, TicksDistance=1,
TicksBetween=0,
AxesLineWidth=0.5, AxesLineColor=[0,0,0],
AxesTitleFont=["Times",12,Italic],
TicksLabelFont=["Times",12],
Width=92.4, Height=51.5,
BorderWidth=1/4*unit::mm);
else
plot(Startz, Punktz(j)$j=1..floor(k1/m),
Kurvez,
Startw, Punktw(j)$j=1..floor(k1/m),
Kurvew,
Scaling=Constrained, TicksDistance=1,
TicksBetween=0,
AxesLineWidth=0.5, AxesLineColor=[0,0,0],
AxesTitleFont=["Times",12,Italic],
TicksLabelFont=["Times",12],
Width=92.4, Height=51.5,
BorderWidth=1/4*unit::mm);
end_if
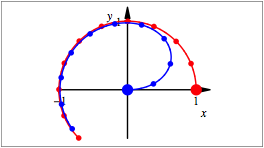
Für ![]() ist der Verfolger
gleich schnell wie das Ziel und erreicht dieses nicht.
ist der Verfolger
gleich schnell wie das Ziel und erreicht dieses nicht.
Nein, sprach der Fuchs, die Trauben sind mir zu sauer
4 Beispiele
4.1 Kosinuskurve
Für ![]() ist der Verfolger
gleich schnell wie das Ziel und erreicht dieses nicht.
ist der Verfolger
gleich schnell wie das Ziel und erreicht dieses nicht.
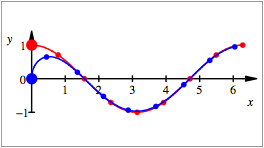
Kosinuskurve
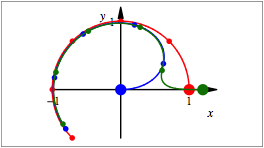
4.2 Langsamer Verfolger
Für ![]() ergibt sich für
den Verfolger als Grenzkurve ein Kreis mit halbem Radius.
ergibt sich für
den Verfolger als Grenzkurve ein Kreis mit halbem Radius.
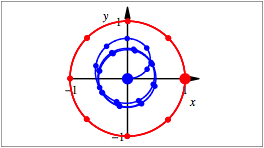
Hoffnungslos
Variante:
Zielobjekt auf Dreieck, ![]() .
.

Dreieck
Generell
erreicht bei ![]() der Verfolger das
Ziel nur, wenn das Ziel sich geradlinig bewegt und der Verfolger vor dem Ziel
auf der Zielgeraden startet.
der Verfolger das
Ziel nur, wenn das Ziel sich geradlinig bewegt und der Verfolger vor dem Ziel
auf der Zielgeraden startet.
Wo man sich trifft
Startet
der Verfolger neben der Geraden, schafft er es auch bei ![]() nicht.
nicht.
Der ewige Zweite
Ein etwas
größeres Tempo, zum Beispiel ![]() , reicht bereits.
, reicht bereits.
Geringfügig schneller
Falls
sich das Ziel kreisförmig bewegt und der Verfolger schon auf dem Kreis vor dem
Ziel ist, funktioniert es auch bei ![]() nicht.
nicht.
Der Verfolger kann nicht warten
Das liegt daran, dass der Verfolger stur in Richtung des jeweiligen Zielortes rennt. Er ist außerstande, die Kurve des Zieles vorwegzunehmen und gegebenenfalls einfach zu warten.
4.3 Mehrere Verfolger
4.3.1 Parallele Verfolger
Zwei Verfolger, beide gleich schnell wie das Zielobjekt, verfolgen unabhängig voneinander von verschiedenen Startpunkten aus.
Beidi wei di, Heidi, beidi, Heidi, hei di gärn.
4.3.2 Konsekutive Verfolger
Der Blaue verfolgt die Rote, der Rote den Blauen.
Eifersucht ist eine Leidenschaft, die mit Eifer sucht, was Leiden schafft.
4.4 Lange Beine und kurzes Hirn
4.4.1 Achill und die Schildkröte
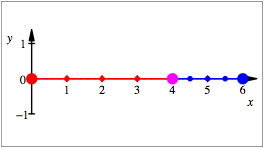
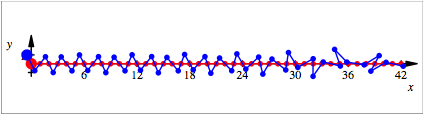
Wir denken uns einen schnellen blauen Verfolger, der aber nur nach jeder Stunde (jede Zeiteinheit) sich auf das rote Ziel orientiert und dazwischen blind drauflos rennt. Er denkt also wie die Bundesbahn im Stundentakt.
Mathematisch:
![]()
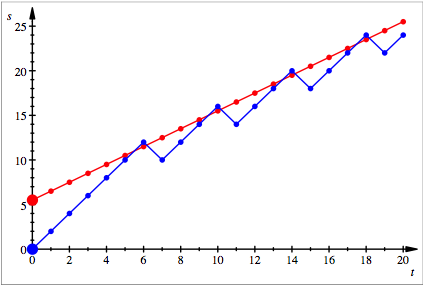
Im
folgenden Beispiel ist ![]() ; der Verfolgten geben wir einen Vorsprung von 5.5. Da dieser
Vorsprung echt halbzahlig ist, die übrigen Daten aber ganzzahlig, ist es nicht
möglich, dass zu einer vollen Stunde rot und blau sich am selben Ort befinden.
Im Zeitraster des Verfolgers gibt es keinen Treffpunkt. Dies ist eine Variante
des bekannten Paradoxons von Zenon von Elea, bei welchem „bewiesen“ wird, dass
Achill eine Schildkröte nicht einholen kann.
; der Verfolgten geben wir einen Vorsprung von 5.5. Da dieser
Vorsprung echt halbzahlig ist, die übrigen Daten aber ganzzahlig, ist es nicht
möglich, dass zu einer vollen Stunde rot und blau sich am selben Ort befinden.
Im Zeitraster des Verfolgers gibt es keinen Treffpunkt. Dies ist eine Variante
des bekannten Paradoxons von Zenon von Elea, bei welchem „bewiesen“ wird, dass
Achill eine Schildkröte nicht einholen kann.
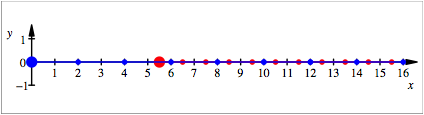
Bewegungsbild
Das Bewegungsbild ist etwas verwirrend; wir zählen 10 rote Punkte, aber nur 8 blaue Punkte. Tatsächlich ist es so, dass zwei blaue Punkte je doppelt sind, weil der Verfolger zeitweise rückwärts gesprungen ist. Sobald er nämlich das Zielobjekt ein erstes Mal überholt hat, merkt er bei der nächsten Orientierung, dass sich dieses hinter ihm befindet. Also rennt er in vollem Caracho rückwärts.
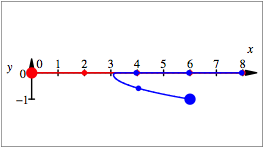
Im Weg-Zeit-Diagramm sehen wir, dass der Verfolger im betrachteten Zeitintervall des Ziel zweimal vorwärts und einmal rückwärts überspringt.
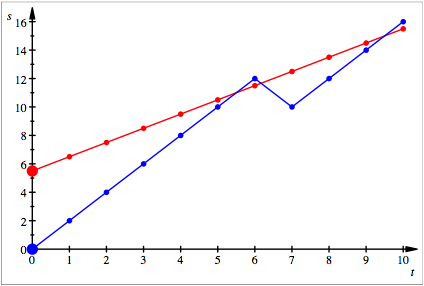
Weg-Zeit-Diagramm
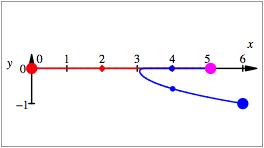
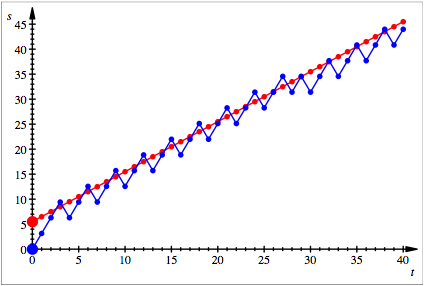
In einem größeren Zeitintervall erkennen wir ein periodisches Verhalten.
Periodisches Verhalten
Ist q irrational, ergibt sich kein
periodisches Verhalten. Würde sich nämlich die vertikale Differenz zwischen
roten und blauen Punkten wiederholen, gäbe es Zahlen ![]() mit
mit ![]() . Dann wäre aber q
rational.
. Dann wäre aber q
rational.
Im
folgenden Beispiel ist ![]() .
.
Irrationales Geschwindigkeitsverhältnis
4.4.2 Start neben der Geraden es Zielobjektes
In den
beiden folgenden Beispielen ist ![]() .
.
Bei
geeignetem Startpunkt ![]() des Verfolgers
ergibt sich offensichtlich eine periodische Figur, welche in ein regelmäßiges
Dreiecksraster passt.
des Verfolgers
ergibt sich offensichtlich eine periodische Figur, welche in ein regelmäßiges
Dreiecksraster passt.
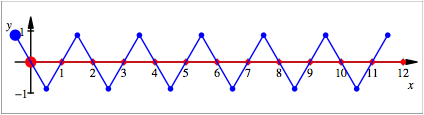
Periodisches Verhalten
Bei leichter Variation des Startpunktes des Verfolgers ergibt sich ein Verhalten, bei dem ich nicht entscheiden kann, ob es periodisch ist. Ich vermute, dass es aperiodisch ist.
Beim
Startpunkt ![]() sieht es zunächst
so aus, als hätte wir eine Periode mit der Periodenlänge 6; die Vermutung ist
aber falsch.
sieht es zunächst
so aus, als hätte wir eine Periode mit der Periodenlänge 6; die Vermutung ist
aber falsch.
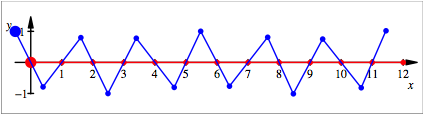
Nicht periodisch
Bei einem größeren Zeithorizont wird es ganz wild.
Größeres Zeitintervall
Literatur
[Simoson
2007] Simoson,
Andrew J.: Pursuit Curves for the Man in the Moone. The College Mathematics
Journal, Vol. 38, No. 5, November 2007. p. 330-338